
4月29日 可視化の追求:その2
比べるとわかりやすくなる
サンプリングトレースを
GOT画面と並べました
同期は
できないことが
わかりました・・・
あたりまえか!
実CPUより
デバッグ
シミュレーションで
はじめてみましょう!

デバッグ
シミュレーションでは
スキャン100msec
一定時間は設定不可
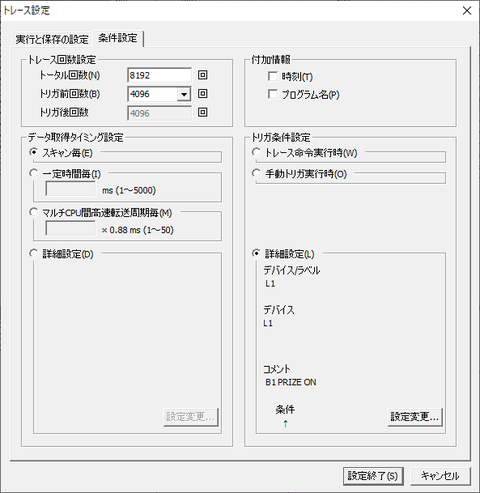
トリガは設定できます
4月28日 可視化の追求:その1
タイムチャートとは?
デバッグメニューのサンプリングトレースを使ってみる
動画です。
まずは、
使ってみる
実機のCPUで
サンプリングしました。
トレース開始で
記録中にります。
記録中は
お待ち下さい
トレース中断で
画像がでます

静止画です
周期は
トレース設定で
行います。
4月24日 修正版
リトライカウントのテンキーは位置変更しました。
右は、99回まで可能ですが、ほぼ無限です。
現状は最大でも3回くらいで
景品がゲットできています。
4月24日:リトライ動作は両ブースへ対応 カウント設定のテンキーは位置変更予定
4月23日 ゲームを楽しむ!
とりあえず、左ブースだけ!
課金のテンキースイッチを追加
5回まで、リトライするようにしました。
4月19日 進化する画面!ランダムに景品をゲット!右か左かどっちが景品ゲットが多いでしょうか?

実機PLCとGOTで仮想ゲーム機をテスト!
昨夜からの結果は、右の勝ち!

全体画面がメニュー画面
左右のブースをタッチすると操作の画面に入ります。
今回は景品ゲットをランダムに発生
どちらのブースが勝つのでしょうか?
4月17日 2つのブースが動いた!
最初のメニュー選択画面を
2台が同時に動く動画にしました。
左か右をタッチすると
ゲームができます。
もうちょっと改善したいけど・・・
まだまだ続きます。
PLCのSCANは0.7msec
実機だと速いです
デバッグ・シミュレーションのSCANは
100msecのです
4月15日 デバッグ・シミュレーションは有効!
シミュレーションでは、いっぱい修正したけど、実機CPUでは修正しなかった!
下の動画はPCのデバッグ・シミュレーションです!
ちょっと遅いけど、3分くらいあります
4月14日 右ブース展開
デバイス名称の見直しで左ブースから右ブースへスムーズに展開
内部のデバイス置換だけで対応できました。
次の課題は何か?
4月13日 動いたシーケンスを見直すとは?
割付け見直して流用しやするには、動いたプログラムを止めることになる。
再デバッグで動かなくなったとき、それでも決行するには勇気が必要‼
4月12日 問題の整理その2
入出力一覧表を作成
1.I/Oアドレスに対して
割付名の変更
左右からプラス・マイナスへ
2.順番の変更
アドレスに対して
X041 クレーン操作SW +X
X042 クレーン操作SW -X
プラスが先か後か
3.スイッチ名の変更からの影響点
センサー信号の名称
モータ出力の名称
4月11日 設計変更を振り返り、真の原因は何かを考える。
基準があいまいだった! 設計基準は何か? どう考えるべきか?
(1)なに?
1.左右移動のスイッチ名を変更
入力アドレスに対して
スイッチの名称が
レバースイッチ左⇒ 操作SW +X
レバースイッチ右⇒ 操作SW -X
2.左右端のセンサー名が変更
X軸左端⇒X軸+移動端
X軸右端⇒X軸-移動端
3.基準の考え方が変更
アクチュエータに対して
どっちが
アクティブ方向か?
どっちが
ポジティブ方向か?
(2)なぜ?
1.左右方向は変わりやすい
左右のブースで
狙いの方向が変わる
2.出力の名称も変わる
プラス・マイナスに
入力の信号名を変更から
出力の名称も変えるべき
3.基準はどっちか?
上昇下降も
アクティブはどっちか?
ターゲットは何か
景品ゲットに向けての方向は
下降がアクティブになる
(3)how どうやって?
1.入出力一覧表を
見直す
アドレスに対して
名称変更する
2.他のアドレスも
プラス・マイナスを
アクティブ方向を
ポジティブとする
3.内部のアクティブ方向
基準を明確にする
アクチュエータごとの
プラス・マイナスを
順番にする
ポジティブ方向を
1番めにする
ネガティブ方向を
2番めにする
順番を明確にする
考え方もシーケンスにすると
順番も基準になる
4月10日 仮想クレーンの右ブース対応と、開発サイクル2段階めへ
4月8日 プライズ対応の完成
ちょっと違和感あるかも・・
嬉しさを優先!
4月7日 シミュレーションは、どう進化すべきか?
景品が表示できるようになりました!
正面図だけですが・・・
4月6日 No.0788 景品を置いたら、それらしくなった!
モード切り替えを追加、スイッチ操作でXY軸が動作します
4月5日 No.0787 Z軸も動いた! 画像配置は3面図仕様
4月4日 ほとんどのPLCプログラムはデバッグで苦戦する
シーケンスとは
順番を動かすこと
ほとんどの
エンジニアは現場の
デバッグで苦戦!
こうするだけで
どう動くかは、
事前にデバッグ
できる!
マネしてつくるワードステップのシーケンス
4月2日 新しい期がはじまりました!
シーケンスを画面にしよう!

シミュレーションの
ベースになった
クレーンゲーム機
SPIN機能があります

これが元祖
UFO CATCHER
アームが3本式
シミュレーションでわかるステップ バイ ステップ
この動画は、撮りなおしました。
デバッグのシミュレーション開始で
動いたメインプログラムです
メイン管理は
D1109
メインシーケンスは
D1100が
10~99
連続して繰り返す
20 レバースイッチ操作
仮想の操作入力で
自動運転を連続します
Actionスイッチを押すと
20⇒30へ
30 SPIN 回転
40 アーム開
50 アームダウン
60 アーム閉
70 アーム上昇
80 ポジションへ移動
90 アーム開
95 回転戻り
99 ゲームオーバー
