
仮想スマートランドリー開発プロセス フェーズ2
7月20日 レビューする
大事なポイントを共有するために、レビューする。
目的は、設計した品質の向上です。
ダイレクトにレスポンスして改修するには、レビューが最適です。
今回の開発プロセスで、感じたこと。
プログラムを変更する時
2つの進め方がある!
1.一気に変える進め方
変更の課題と要点を抽出して
一気に変更する。
2.徐々に変える進め方
抽出した課題の要点を、動きを確認しながら
徐々に変える。
あなたは、どちら派ですか?
業界にもよりますが、FAでは環境づくりが困難なので
一気に変える技術を求めるようです。
その為、リスクも高く、手戻りも多くなります。
では、その対策は?
1.レビューを繰り返す。
「実際のメカは見ないとわからない」
この考え方から脱却して、
仲間を募ってレビューをする。
仲間と共有できる情報を元に
問題を伝える。
2.真の問題を追求する。
問題の明瞭にして、真の原因を考える。
スマートランドリーような事例で
問題とそのプロセスを共有する。
足跡を追跡することで
真の原因をみつける
再現することがポイント!
3.比較して評価する。
並べて比較する。
比較評価するために
要素をリストアップする。
2つを比較すると、
3つめも見たくなる。
自分にマッチする方法を探しましょう!
7月19日 たくさん課題から3つに集約!
1.プログラムのブラシュアップ
2.エレベータ指令値生成の見直し
3.カゴの位置ズレは検討中
連続運転の実施中

手動操作と自動スタート
プログラムをブラシュアップして
改善中
7月18日 入庫処理で大きな課題に遭遇!
大きな流れを優先するのは、正しかった!
入庫動作に入ると、プログラム的に勘違いしていた問題を見つけました!
プログラム的に、見直した結果、
ストッカの自動運転がわかるになりました。
ただし、内部はまだまだ、課題が多い!
もっとキレイなつくりにしなければ・・・!
3階、4階のカゴを出した後、
すぐに入れる動作を実行しています。
シミュレーションが
それなりに速くなったので
デバッグが楽になりました。
7月17日 大きな流れをつくる!
全体の自動運転の流れが未完成!
という問題があります。
(1)何が未完成か?
大きなシナリオ:あらすじプログラムになっている!
(2)なぜ未完成?
運用問題を見える化するために
細かい手動操作の画像づくりにハマっていた!
(3)どうする?
全体の流れを優先する。
多少、画像的に乱れた動きでも
大きな流れの見える化を優先しましょう!
7月15日 アドレス見直し
デバイスメモリのアドレスが流用した元と重複していました。
PLCの課題は、ほとんどがデバイスメモリのどこを使うのかが悩みですね!
マップをつくって育てていくことが大切です。
7月14日 コンスタントスキャンを学んでみましょう
待ち時間に何を行う
サービス処理を評価してみよう!

コンスタントスキャンは実績から
空き時間が
待ち時間になる

コンスタント
スキャンを4msecにした例
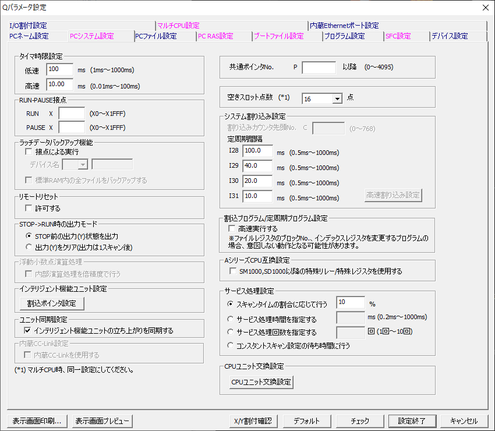
サービス処理設定は10%から
7月13日 申し訳ございません。
「GX-Works2のシミュレーションが遅い!」は誤りでした!
パラメータ設定でカンタンに速くなりました。
でも、おかげで高速、低速の切換え機能に取り組むことが出来ました!
エレベータのフォークも
高速、低速切換えを実施しました
が・・・
問い合わせしたら、
スキャンタイムを
パラメータ設定できる
ことが分かりました。
設定内容は、
下の画像です。
副産物として
高速、低速の切換え機能が
できました!

GX-Works2のPC-RAS設定で
コンスタントスキャンを設定しましょう!
今回は10msecくらいが
よさそうでした。
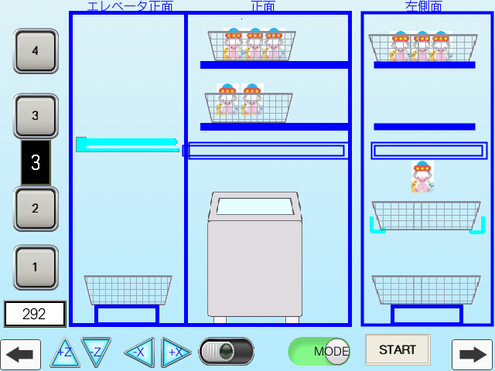
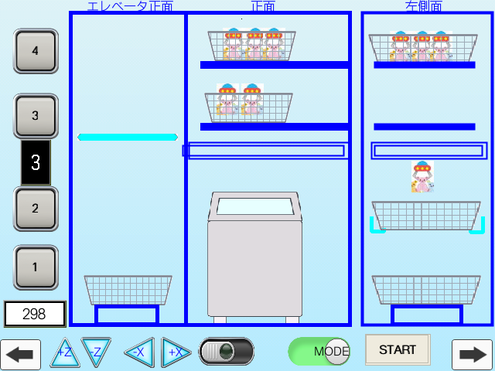
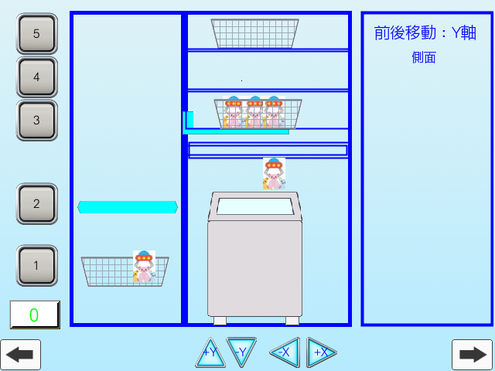
7月12日 エレベータ移動の高速と低速の切換え!
エレベータの動きが
高速、低速に切り替えています!
次は、フォークの動きを
チャンとしよう!
7月11日 調整作業が大切!
動画
調整作業とは、
安心して動かせる位置を調整するコト
「枕を高くして眠る!」
この為に、
絶対に手を抜いてはいけない作業です。
静止画
数値表示で伝える
から
画像表示で伝える
7月10日 動画づくりがデバッグになる!
なかなかオモシロいです!
いろいろ課題が見つかりますので、
かなり完成度がアップします!
みんなで取り組みましょう!
今の課題は・・・?
スピードです。
1.シミュレーションは、
速度が遅すぎる。
PLCツール上のシミュレーションと
実PLCとGOTを使った運転では、
画面上の移動速度が違い過ぎる。
その差は100倍です!
上記は、誤りです!
設定変更できることを
知りませんでした!
2.実機は、PLCのスキャンタイムが
基準になる。
数msecと200msecの違い
シミュレーションでは
100msecのクロックは反応できない。
3.加減速を考える。
実メカでも速度切換えしているので
加減速に対応して仮想でも、
移動速度を切り替える。
実際にはインバータを使うので
加減速を想定したシミュレーションを
ソフト的に作ってみる。
コストを欠けないで!
シミュレーションをレベルアップしましょう!
7月9日 シミュレーションは、遅すぎる!
まずは、昇降装置だけです!
やっぱり動画の方がわかりやすい!
ただし、
シミュレーションは遅い!
実機の100倍遅い!
スキャンタイムが固定なので
高速化を考えよう!
実機のGOTから画像という手もあるが
お金がかかるので、アタマを使おう!
7月8日 やっぱり画像!
まずは、静止画像
7月2日:データ構造の持ち方
本当の問題は、エレベータのデータ構造にあり!
親:上下移動装置
子:フォーク前進、後退移動
孫:洗濯カゴの状態変化
6月29日 入力信号の自動処理
各階ポジションの入力信号生成
左の回路は
各階のポジションスイッチの
信号を生成しています。
右のデバイスモニターはD100から
数値が変化しいます。
エレベータ昇降の各階停止操作
上昇ボタンを押し続けても、
D100の数値変化が止まります。
押釦をオフしてから、再度、押すと
動きが再開します。
6月28日 手動の中にも自動がある。
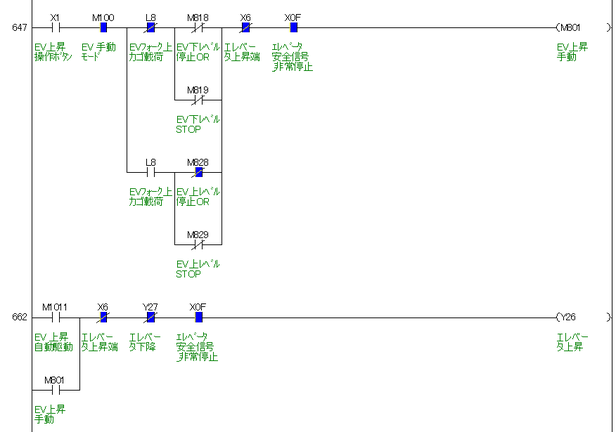
エレベータ上昇出力の手動操作回路
X1は、エレベータ上昇の押ボタン入力です。
押し続けても、各階で停止します。
Y26は、エレベータ上昇の出力です。
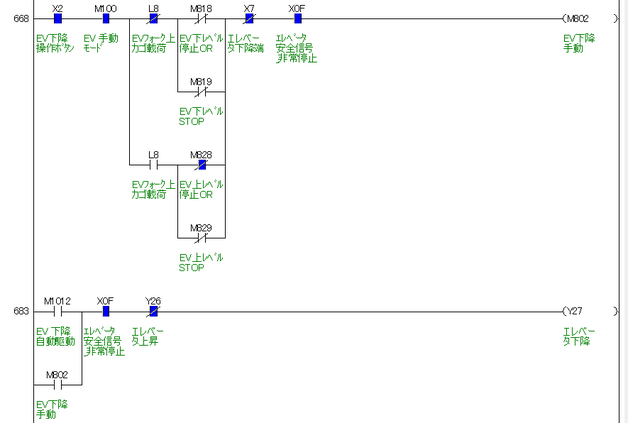
エレベータ下降出力の手動操作回路
X2は、エレベータ下降の押釦入力です。
押し続けても、各階で停止します。
Y27は、エレベータ下降の出力です。
6月25日
何仕込みには、時間がかかる
(1)手動操作ソフトとは?
1.自動運転の前の準備
基本の知識も
トレーニングも必要。
ボタンの種類にはタイプがあり、
どう使い分けるか?
2.手順が大切
モノを立ち上げるには
あとさきがある。
順序、順番、
手順がある。
手順は試行錯誤で
コトバにする。
3.調整作業が関所
モノづくりの中には
調整ステップがあります。
手動操作のプログラムは、
調整作業が目的です。
何をもって調整完了とする?
どういう手順で実施した?
チェックと記録がポイントです。
(2)具体的には?
1.エレベータは上下に移動
停止するポジションは複数あります。
複数のポジションで、
変わらない棚の位置と
調整が必要になります。
2.1階から4階まで
いくつのポジションがあるか?
フォークの上にモノがあるかないか?
停止ポジションは2種類ある
下レベルと上レベル
各階に2つずつあります。
3.フォークは伸びた状態で
エレベータを上下します。
カゴを上げたり下げたり
高すぎず、低すぎず。
上下の高さを
すべての階で調整していきます。
この調整作業で、
手動操作のソフトがキモになります。
ボタン操作は、
モーメンタリがいいか?
オルタネイトがいいか?
調整作業の段階によって
決まります。
(3)どうやるか?
1.新しい装置、未経験の機構
基本を大切に
まずは、モーメンタリスイッチで
押している間だけ動くソフトにする
2.各階の仮の位置では
ボタンを押しつづけても停止する。
ここがプログラム技術の出番
全階で手動操作ボタンを
押しつげけても自動で停止する。
これらは、
体感体得する領域ですが
参考になる作り方は、
聞いた方が早い!
今回のエレベータは、
参考になると思います。
3.調整段階を2段階に分ける
初めての機構は慎重に動かします。
最初の調整段階では
インチング操作で
停止ポジションの再現性を
チェックする。
次の調整段階は、
ボタンを押したら
手を放しても動作を続ける
オルタネイト型にする
徐々に動作スピードを上げて
安定性をチェックします。
シミュレーションで事前に調整、プログラム修正を繰り返します。
シミュレーションでつくりこむ。
急がば回れ!
シミュレーションは、
仕込みの作業の一部になります。
6月23日 最小棚数へ運用見直し
カゴの持ち出し対応からカゴを保管する段数を最小化
運用の見直しを考えます。
1)1階でカゴを出し入れします。
2)2階で自動搬送します。
3)棚数は最小2段にします。
洗濯カゴは3つで運用テストします。
(1)運用の変更とは?
1.カゴの入替え階の変更
2Fから1Fへ変更
2.自動搬入する階の変更
上記の1Fへ変更に伴い
ピッキング対応の高さを
1Fから2Fへ変更
3.棚の階数を変更
棚間のピッチとカゴの高さ
自宅で運用イメージを評価
(2)なぜ?
1.カゴの持ち出し対応
最下位の1Fからカゴの
持ち出しに変更したので
1Fと2Fのカゴの運用が
ポイントになります。
2.自動で洗濯物を運ぶ高さを
エレベータの2Fに変更
ピッキング中は
カゴはフォークに載ったままで
クレーンが運びます。
3.階数は自宅の高さ制限から
高さ2メートルくらいに対応
所有カゴは3つくらいでも
連続運転に効果を期待!
(3)どうやる?
1.1Fでカゴ置き台を設定
フォークがスイングで
抜ける高さの台を設置します。
カゴの有り無しセンサーを
設けます。
2.2Fは洗濯機とクレーンの
高さで可変にします。
エレベータの停止高さは
調整可能にします。
3.棚は1段減っても
1Fのカゴを置く台を活用
トータルのカゴ数は3つで
いけそう!
洗濯機は洗濯時間が
約40分かかることが
わかりました。
朝に2回の洗濯は
時間が厳しい!
色物分類が基本になるようです。
大家族で3回以上の洗濯運用は
棚の階数増加で対応します。
最小の棚数で運用シミュレーションします。
運用テストを優先しましょう。
1F:自動搬送するカゴの位置
2F:洗濯カゴを出し入れする階
3F:カゴを保管する棚1段目
4F:カゴを保管する棚2段目
5F:カゴを保管する棚3段目
(1)ユーザーファースト!
洗濯カゴの出し入れ操作とは何か?
1.洗濯機の上に設ける棚とは?
カゴを仮置きする棚
2.3段の棚を持つ仕様の時、
カゴは何個使う?
3.洗濯カゴは持ち出せるか?
3段仕様はカゴを3つ保管します。
洗濯物を入れたり
洗濯後の衣類を干するとき、
機械の外へカゴを、
持ち出すことができるか?
(2)なぜ?
1.カゴの無い棚から
カゴを出すことは
出来ません。
2.カゴのある棚へ
カゴを入れることは
出来ません。
3.フォークの上に
カゴを出し入れする
専用階が欲しい。
(3)どうする?
1.カゴの持ち出しを可能にする。
利用する洗濯カゴのサイズを規定して
カゴは追加できるようにします。
2.フォークの上にカゴの有り無しで
入出庫を判別します。
3.フォークの上にカゴが乗っているとき
各階ボタンで指定の棚へ入庫します。
既にカゴがある場合は、
メッセージを出します。
4.フォークの上に、カゴが無い時、
各階ボタンを押すと所定の棚から
カゴを出庫します。
フォークの上から、
カゴを持ち出した時は待機になります。
6月2日 インターロックが必要になるとは?
テーブル
シリンダー
ロッド
チャック
これらが同時に動く
シミュレーションです。
6月1日 3D-CADを活用 iCAD+IPCのサンプル画像を学習
